Ground Control
Files
Edit this page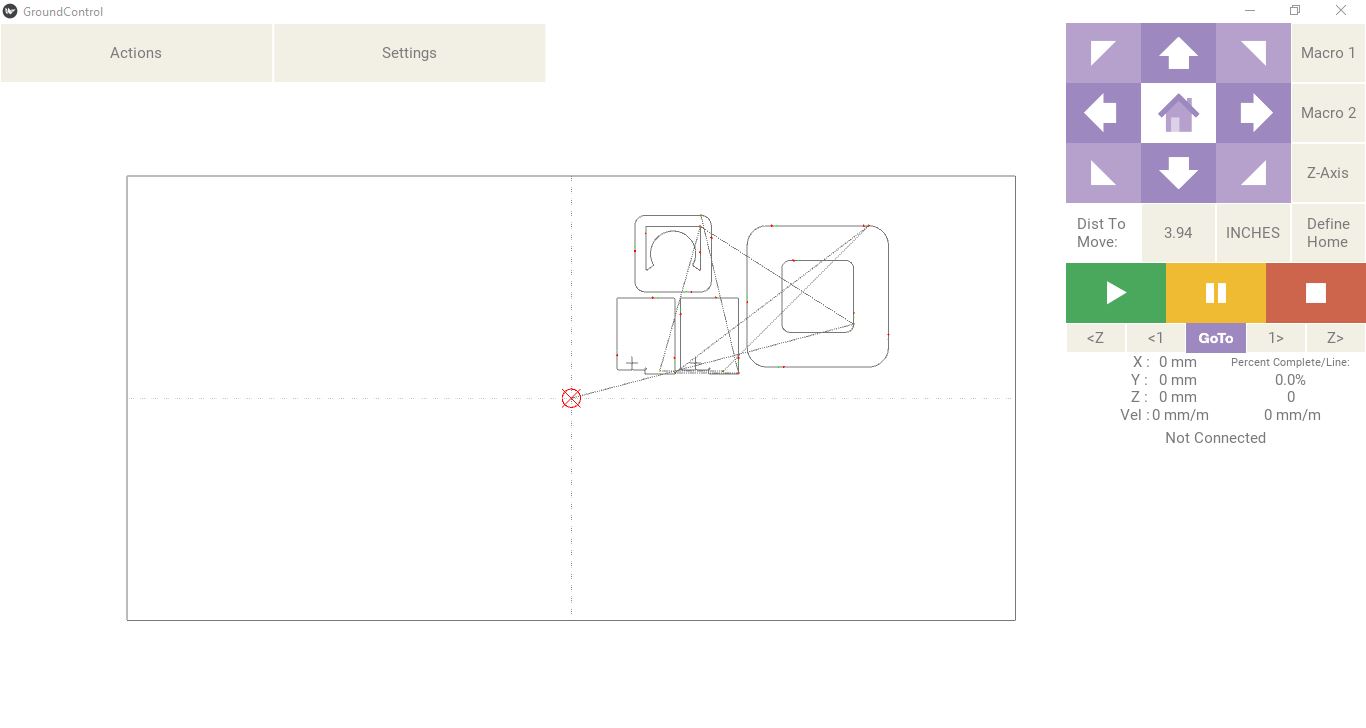 | Download FilesSource |
Ground Control
Ground Control is the program which allows you to control the Maslow CNC machine.
Note: Ground Control has been superseeded by Web Control which is a community led project. For new installs consider using Web Control instead.
======================
Overview
Ground Control is the program which allows you to control the Maslow CNC machine.
From within Ground Control, you can move the machine to where you want to begin a cut, calibrate the machine, open and run a g-code file, or monitor the progress of an ongoing cut.
At present, the UI looks like this:

Ground Control is written in Python. It was chosen because it has good cross platform support and is relatively simple to work with.
Two of the goals of Ground Control are:
1) It runs on as many platforms as possible. 2) It is as easy as possible for members of the community to contribute to making the program better.
Index
- Installation
- Documentation
- Development Setup
- Support
- How To Contribute
- Program Data Flow
- Beginner's Tips
Installation
For Windows and OS X binaries, see the releases page.
For help installing binaries, see the installation guides.
Documentation
Ground control documentation is available on the project wiki.
For help in using Ground Control, see the users guide.
Development Setup
Ground Control is built using the 2.7.x version of the Python language. 2.7 was chosen instead of 3.x because the support for compiling binaries for the 3.x version is not good enough yet.
Maslow uses the Kivy framework for the UI and the pyserial module for USB communication.
You might also consider taking a look at Virtual Environments to save you from python version headaches later on. This is not a prerequisite for installation on any platform.
Windows
To setup your computer to run Ground Control from the source code, first download and install Python version 2.7.x.
Once you have installed Python 2.7.x, open the command prompt and type
bat
python --version
You should then see something similar to this:
bat
Python 2.7.11
If python does not open, it is most likely an issue with the PATH environment variable.
For more information about configuring the PATH in Windows, see superuser: How to add python to the windows path.
Next, you need to install Kivy and Pyserial. Fortunately, python comes with a built in package manager, pip which will install both of them for you.
Installing pyserial
To install pyserial, type:
bat
python -m pip install pyserial
Installing Kivy
Installing Kivy is a little more complicated. First, check to make sure your version of pip is up to date by running:
bat
python -m pip install --upgrade pip wheel setuptools
then install dependencies:
bat
python -m pip install docutils pygments pypiwin32 kivy.deps.sdl2 kivy.deps.glew
and finally install Kivy:
bat
python -m pip install kivy
OS X
To install Python on OS X, first install Homebrew
bash
/usr/bin/ruby -e "$(curl -fsSL https://raw.githubusercontent.com/Homebrew/install/master/install)"
then install Python:
bash
brew install python
Install required dependencies:
bash
pip install -r requirements_osx.txt
Linux
Python is bundled with all major linux distributions. You can confirm the version of python you have installed with:
bash
python --version
See documentation for your linux distro on how to install Python 2.7.x if it is not installed.
Once Python 2.7.x is installed, install required dependencies:
bash
pip install -r requirements_linux.txt
Running Ground Control
Ground Control can be run from the command line. From within the project folder, run the following:
bash
python main.py
Support
If you have any questions or issues with this process please get in touch through the Maslow forums.
If you had any issues which you were able to resolve, please consider raising a Pull Request on this README.md file with corrections or additions. For more information, see How To Contribute below.
How To Contribute
Maslow is an open source project, get involved!
Bugs
If you find a bug in the software, report it on the issues page.
Feature requests
If you have an idea for a new feature, let us know in the Maslow forums.
Contributing
If you want to get involved, say hi in the Maslow forums.
If you've already jumped in and started making the software better, feel free to submit a pull request! You can learn more about how to do that here Github Help: Creating a pull request
Program Data Flow

Beginner's Tips
In the .kv file:
Kivy uses groundcontrol.kv as a description language for most of the widgets in GroundControl; some tips:
1. Class References:
root.X refers to things inside the class. You can add your own variables, but they don't get initialized in time to be used (so root.data doesn't work)
but you can use app.X to refer to things in the app namespace, so app.data will always work. BUT you must define the variable in DataStructures/data.py;
things put in the data dict at runtime will not work.
Formatting: You can include format strings and logic in the .kv file; eg
text: "{Z: %.2f}"%app.data.zPoswill automatically expand/update whenapp.data.zPoschanges. But, if it's a text input field, you need to hook the field to an event -- changing the text in the box will not updateapp.data.zPos.Referring to UI bits in code: If you want to refer to a widget in the code, you need to give it an id, and you need to put a
id:idstatement after the widget definition starts Otherwise, you won't be able to access it in the code. If you put anid:idstatement in place but you don't declare a widget with that id, it will crash when you bring up the widget.Attributes: Most attributes (eg.
text_size,multiline,disabled, etc) are not inheritable (you can't set the attribute in the "GridLayout" portion); they have to be decorated on each control.Layouts: GridLayout's et al don't support "span" to span columns or rows. If you want to do that kind of thing, redo the grid to the large size and put sub-GridLayouts in the cells. Try to make the cells the same size so they line up nicely. The Layouts will not actually work unless you have
rows&columnsattributes in them. The log file will complain about this, so watch for it. You can auto-size-to-the-minimum sometimes withsize_hint_x: None. But if you give it a 2 (ie,size_hint_x: 2for 2%), it always works kinda (it always works but may not do what you expected).Coordinate Systems: Kivy defines things as origin is bottom-left, an increasing Y is up, increasing X is right. Please use
self.originin the code -- if you draw something, 0,0 is the bottom-left of the application, not the bottom-left of your widget.Events: Always bind to the
on_touch_upevent. If you bind to theon_touch_downinstead, you get a behavior that looks like a click-through:- You catch the
on_touch_down, and pop-up a menu with a button on it. - The mouse is still down... so it will select a file (if file_dialog), or if the next dialog catches the
on_touch_upevent, it will fire as soon as the click is released
- You catch the
Python Tips:
- If an object begins with a capital letter, it is a global object (eg,
CanvasSize=4). Don't doCamelCase; docamelCaseinstead. - If you want to persist values across functions, they need to be in the object-space (
self.x) or in the global-space (CanvasSize), or in App-space (app.data.Xorself.data.Xafter init) If you use a variable without theself., it will work but it won't be persisted, so it can be annoying to figure out what (didn't) happened. - If you want to call another function in your class, preface it with
self.(eg,self.recomputethis()-- and the self arg gets passed in automagically) - Always remember to call the super if you're implementing
__init__ - Remember - your dialog/widget/etc can go away without calling the callback function - the user just clicks back to the main window. Don't count on the callback to save state. Don't use the callback to put the machine in a known state (because it may not get executed).
- Dialogs don't get to close themselves; when your
self.doneis executed, call your callback function, and your parent can get data out of your dialog and is responsible for closing you. But see rule #5. - Remember - Python is case-sensitive... and filename/directory/case sensitive as well.
- Much mumbo-jumbo about how to save data in the .ini file
- Some mumbo-jumbo about how to use the logger
- If you need to send a command to Maslow, use the
self.data.gcode_queue.put('GCode-Here') - Mumbo-jumbo about how to get data back from Maslow
- On the g-code canvas, 0,0 is the center, and bottom-left is -X,-Y (y axis is reversed compared to old computer code, but "usual" in math terms).
- json does not know about tuples. It will make the variables a list and if your functions can't handle that, you need to convert them.
General UI Layout:
- frontPage - is the root host for all widgets.
- screenControls - has all the buttons on the main screen (both the top bar and the right side)
Instructions
Edit this pageNote GroundControl was the original control software written by @BarbourSmith for the Maslow CNC. Since then WebControl was introduced and is now considered the goto control software. You can still download and use GroundControl, but developement has stopped, any you will find less and less support for it as memories fade. We recommend you use WebControl.
Ground Control is the program which runs on your computer and lets you control your machine. It provides controls to move the machine around, gives you a digital position readout, and lets you open and run Gcode files.
Ground Control is free and is updated every other week with new features.
Ground Control runs on Windows, Mac, and Linux computers.
Click below for instructions to install Ground Control on your system:
Please note:
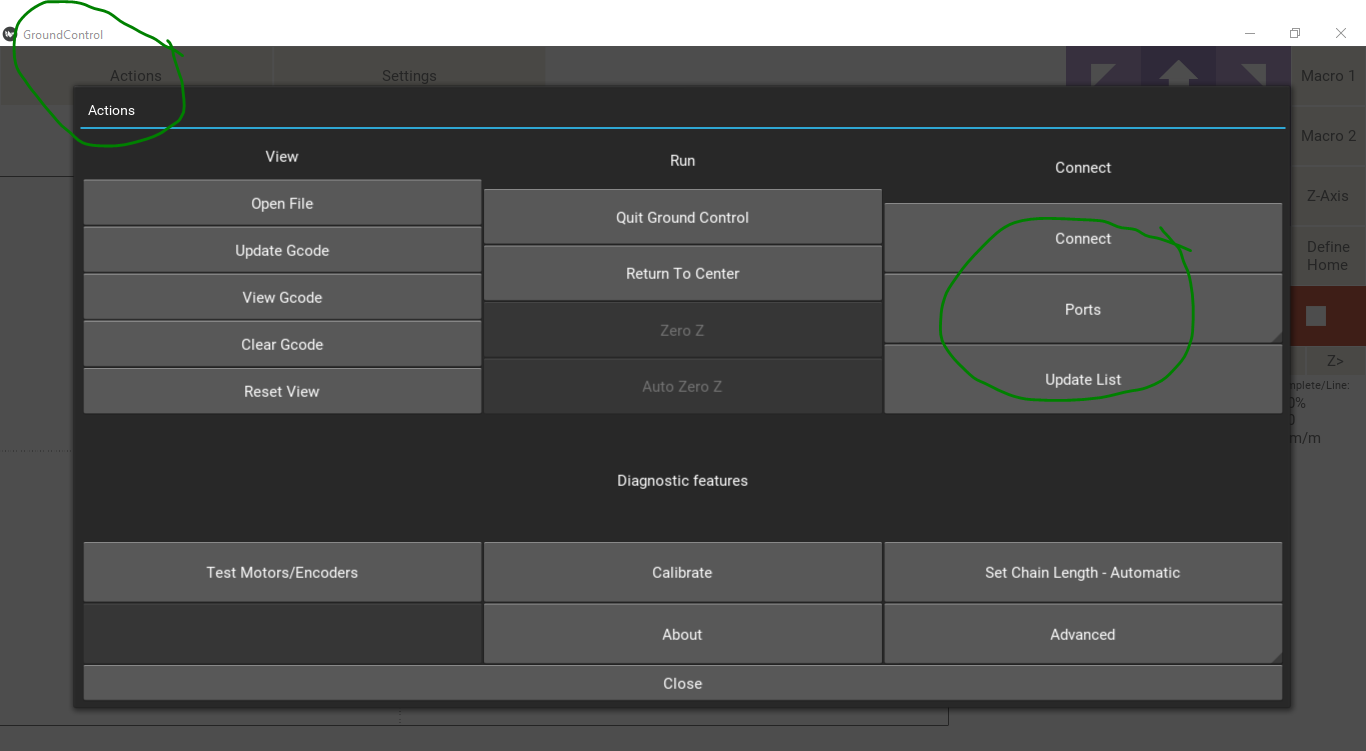
The first time you open Ground Control you will need to tell it how to connect to your machine. Click Actions in the top left corner of the screen, click the Ports drop down to select the same port you chose when uploading the firmware, then press Connect. Your choice will be remembered so you do not need to do this step again.
Here is the Ground Control Users Guide